Mobiele robotica: toepassingen en capaciteiten

De gebruikelijke industriële robots zijn meestal stationair met een scharnierende arm (gelede robot) en grijper, die aan een vast oppervlak zijn bevestigd. Mobiele robots daarentegen hebben het vermogen om vrij in hun omgeving te navigeren en zijn niet beperkt tot één locatie (1). Met de komst van mobiele robots startte er een nieuw hoofdstuk in de wereld van intelligente systemen, met meer flexibiliteit en autonomie. De toepassingen van mobiele robotica beslaan een breed scala van slimme inventarisatiesystemen tot ruimteverkenningen (Rovers) en reddingsoperaties. Mobiele robots worden voornamelijk gecategoriseerd op basis van hun bewegingswijze (voortbeweging): zo zijn er Wheeled Mobile Robots (WMR), mobiele robots op wielen, Legged Mobile Robots (LMR), ofwel mobiele robots met “benen”, mobiele robots op rupsbanden (Tracked Locomotion Mobile Robots), en robots op basis van lucht en op water (Air-based en Water-based) (2).
WMR’s zijn het meest volwassen type mobiele robot, aangezien transport op wielen al de belangrijkste voortbewegingsmethode is geweest voor vele andere soorten mobiele systemen (bijv. treinen en auto’s). De Automated Guided Vehicle (AGV) heeft inmiddels een reputatie opgebouwd als automatisch material handling-systeem. De Autonomous Mobile Robot (AMR), een geavanceerdere versie van de AGV, is ontworpen om vooraf bepaalde taken zelfstandig uit te voeren. AMR’s zijn geprogrammeerd om naar bepaalde locaties te rijden en kunnen zelf nieuwe routes vinden naar de eindbestemming. De toepassingen van dergelijke slimme systemen zijn divers, namelijk bijvoorbeeld in material handling, onderhoud en landbouw. Wat AMR’s onderscheidt van andere mobiele systemen, is de robuustheid ervan in onvoorspelbare omstandigheden. Wanneer een obstakel bijvoorbeeld het pad van de robot blokkeert, kan hij een nieuw pad berekenen dat wel toegankelijk is.

Afbeelding 1: Avidbots Neo autonome vloerreinigingsrobot. | Credits: Avidbots
Een ander domein binnen mobiele robotica zijn de Legged Robots. Geïnspireerd door dieren en mensen, zijn ze ontwikkeld met een vergelijkbaar voortbewegingsprincipe. Waar de mogelijkheden van WMR’s sterk afhankelijk zijn van het oppervlak waarop de wielen rollen, zijn de Legged Robots in staat om zich op oneffen oppervlakken voort te bewegen, te klimmen en te functioneren op niet-harde ondergronden (bijv. modder, zand en sneeuw). Een van de pioniers op dit gebied is BostonDynamics (3).

Afbeelding 2: Robot Spot, Credits: BostonDynamics
De combinatie van WMR’s en Legged Robots bestaat ook en staat bekend als Wheel-Legged Mobile Robots (WLMR). Dit type robot gebruikt de hybride eigenschappen van wielen om zich snel voort te bewegen en gebruikt de beengewrichten om de bewegingsflexibiliteit te vergroten. Bij ruimtemissies is het energieverbruik van cruciaal belang. Bovendien moet de sonderobot veelzijdige taken uitvoeren, waardoor het integreren van de voordelen van rollen en lopen een belangrijk verschil maakt (Afb. 3). WLMR’s vallen in een meer algemene categorie mobiele robots, genaamd Reconfigurable Mobile Robots (4). Herconfigureerbare robots worden voornamelijk gebruikt wanneer vanwege de onzekerheid van de werkomgeving mechanische aanpassingen nodig zijn, zoals afmetingsaanpassingen of een verandering in het voortbewegingsmechanisme. De mechanische herconfiguratie helpt het systeem om trappen te beklimmen, gaten over te slaan en veranderlijke paden (zoals van zand of sneeuw) te betreden.
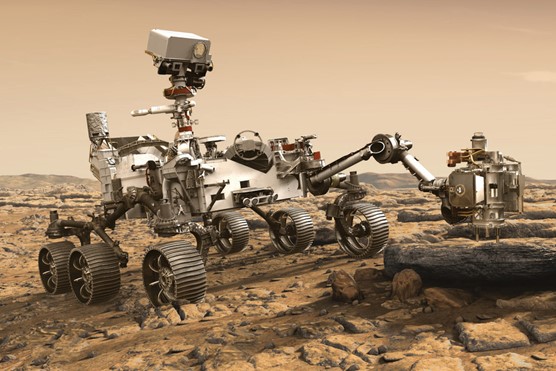
Afbeelding 3: Mars 2020, Credits: NASA/JPL-Caltech
Het verzamelen van informatie uit de omgeving en daarnaar handelen zijn de factoren die robots onderscheiden van andere, gewone machines. De mechanische structuur van mobiele robots, met name WMR’s, is aanzienlijk verbeterd. De sensorische en besluitvormingsunits worden echter nog voortdurend verbeterd om aan de verwachtingen van mobiele robots te voldoen. De meest cruciale sensoren voor mobiele robots zijn de statusinschattings-, bewegingscontrole-, objectherkennings- en actieradiussensoren, die worden gebruikt voor verschillende soorten mobiele robots (5). De ontvangen gegevens van de sensoren worden gebruikt om verschillende bewegingsacties te genereren, zoals navigatie, routeplanning en het vermijden van obstakels. De recente volwassenheid op het gebied van kunstmatige intelligentie en beeldverwerking kan mobiele robots voorzien van een uitgebreide informatie over hun omgeving. Mobiele robots kunnen dus worden toegepast in omgevingen waar de situatie dynamisch verandert.
Bronnen:
- DOI: 10.1109/TRO.2021.3071615
- https://doi.org/10.1177/1729881419839596
- https://bostondynamics.com/
- https://doi.org/10.1007/s10846-020-01163-7
- https://doi.org/10.1007/978-3-540-30301-5
